Investigadores en ETH Zürich son muy buenos manteniendo robots de pie. En el año 2022, el equipo de robótica de la escuela enseñó al robot cuadrúpedo ANYmal cómo escalar montañas sin caerse. Una nueva investigación de la escuela, publicada en colaboración con el Instituto Max Planck de Sistemas Inteligentes con sede en Stuttgart, toma un enfoque único para el problema de atravesar terrenos irregulares.
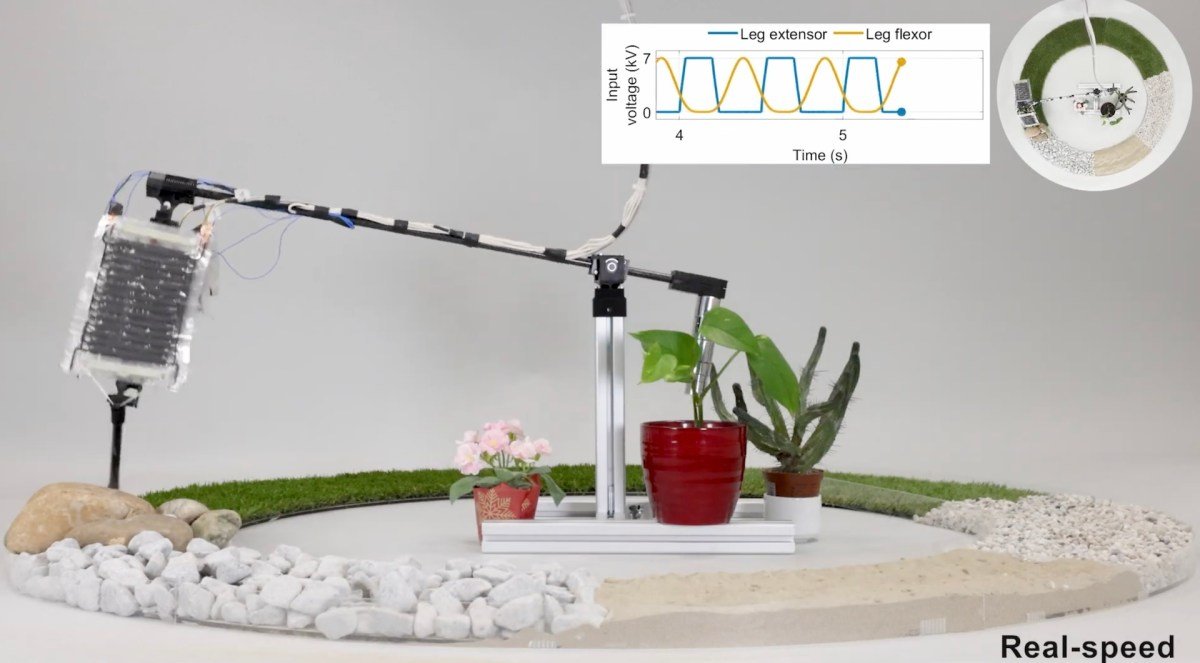
Los músculos artificiales mostrados por las escuelas funcionan con un sistema electro-hidráulico híbrido. Además de la capacidad de ajustarse automáticamente a la superficie que están atravesando, las piernas se mueven más rápido y saltan más alto que sus contrapartes eléctricas más estandarizadas, todo sin requerir sensores o controles adicionales.
Los actuadores de las piernas son sorprendentemente simples. Los equipos los describen como «bolsas de plástico llenas de aceite, similares a las que se utilizan para hacer cubitos de hielo». Luego estas bolsas están cubiertas de electrodos. Honestamente, todo esto suena un poco como un proyecto de ciencias escolar.
«Tan pronto como aplicamos un voltaje a los electrodos, estos se atraen entre sí debido a la electricidad estática», dice el estudiante de posgrado Thomas Buchner. «De manera similar, cuando froto un globo en mi cabeza, mi cabello se pega al globo debido a la misma electricidad estática».
Las bolsas luego se expanden o contraen, según el voltaje aplicado. A diferencia de los actuadores eléctricos estándar, el sistema no genera mucho calor. Por lo tanto, los actuadores ayudan al sistema a atravesar terrenos irregulares y a saltar alto. Sin embargo, en términos de uso en el mundo real, el sistema aún tiene un largo camino por recorrer.
«Comparado con robots caminantes con motores eléctricos, nuestro sistema todavía es limitado. La pierna está actualmente unida a una varilla, salta en círculos y aún no puede moverse libremente», dice Christoph Keplinger, un profesor del Instituto Max Planck. «Si combinamos la pierna robótica en un robot cuadrúpedo o un robot humanoide con dos piernas, quizás algún día, cuando esté alimentado por batería, podamos desplegarlo como un robot de rescate».